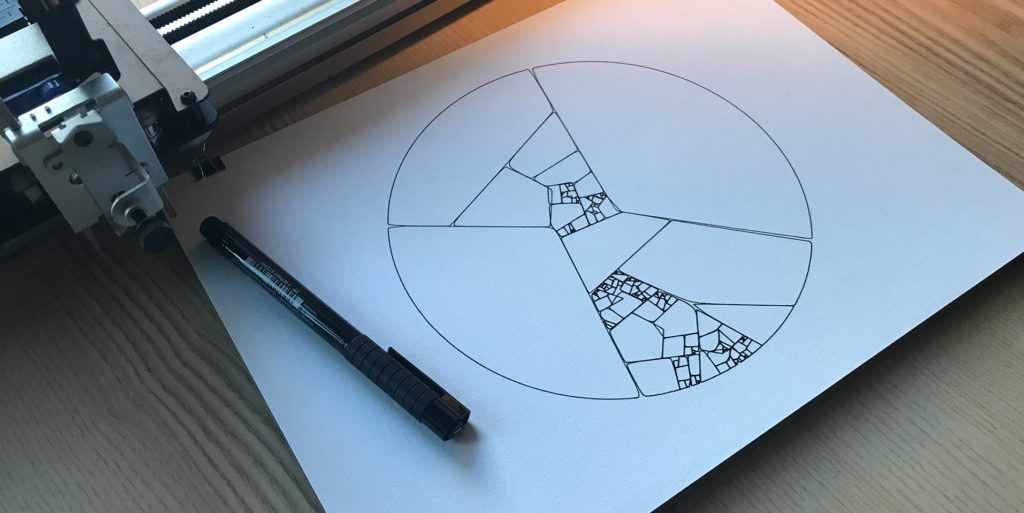
В этом посте решил стремиться к чему-то более сложному, попытаться разработать алгоритм с нуля. Я называю этот алгоритм «лоскутным одеялом», хотя и не утверждаю, что изобрел его. Я уверен, что многие до меня обнаружили тот же алгоритм.
Алгоритм, который мы попытаемся реализовать, работает следующим образом:
- Начнём с набора из N исходных точек.
- Выберите группу точек и нарисуйте выпуклую оболочку, которая окружает их все.
- Удалите точки, содержащиеся в выпуклой оболочке из нашего набора данных.
- Повторите процедуру с шага 2.
«Выпуклая оболочка» — это выпуклый многоугольник, который инкапсулирует набор точек; это немного похоже на то, как если бы мы забивали гвозди в каждой точке, а затем наматывали вокруг них нитку, чтобы создать замкнутую форму.
Чтобы выбрать кластер, мы будем использовать известный алгоритм k-means для разделения данных на N кластеров, а затем выберите тот кластер, который имеет наименьшее количество точек. Вероятно, есть много способов случайного выбора кластеров, возможно, более оптимально, чем с k-means.
Первоначальная настройка
Сначала установите необходимые библиотеки, а затем создайте новый скрипт с помощью penplot. (доступен на GitHub)
# install dependencies
npm install density-clustering convex-hull
# generate a new plot
penplot patchwork.js --write --openТеперь, давайте начнем с добавления одного и того же кода из части 1 и вызовем функцию (update) для обновления для нашего алгоритма. Нам также нужно вернуть { animate: true }, чтобы penplot запустил цикл рендеринга, а не просто рисовал один кадр.
// ...
import { PaperSize, Orientation } from 'penplot';
import { randomFloat } from 'penplot/util/random';
import newArray from 'new-array';
import clustering from 'density-clustering';
import convexHull from 'convex-hull';
export const orientation = Orientation.LANDSCAPE;
export const dimensions = PaperSize.SQUARE_POSTER;
export default function createPlot (context, dimensions) {
const [ width, height ] = dimensions;
// A large point count will produce more defined results
const pointCount = 500;
let points = newArray(pointCount).map(() => {
const margin = 2;
return [
randomFloat(margin, width - margin),
randomFloat(margin, height - margin)
];
});
// We will add to this over time
const lines = [];
// The N value for k-means clustering
// Lower values will produce bigger chunks
const clusterCount = 3;
// Run our generative algorithm at 30 FPS
setInterval(update, 1000 / 30);
return {
draw,
print,
background: 'white',
animate: true // start a render loop
};
function update () {
// Our generative algorithm...
}
// ... draw / print functions ...
}
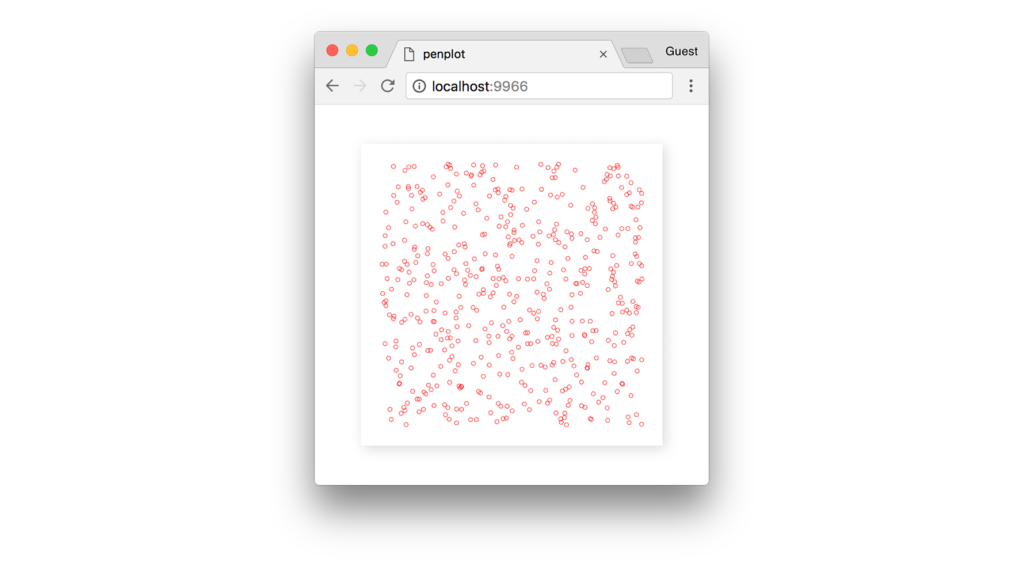
Вы ничего не увидите, если запустите код, потому что наш массив строк пуст. Если бы мы визуализировали наши случайные точки, они выглядели бы так:
Давайте сделаем так, чтобы при каждом запуске функции (update) в массив lines добавлялся новый полигон. Вторым шагом в нашем алгоритме является выбор кластера точек из нашего набора данных. Для этого мы будем использовать модуль кластеризации плотности, фильтруя результаты, чтобы убедиться, что мы выбираем кластер с не менее чем 3 точками. Затем мы сортируем по возрастанию плотности, чтобы выбрать кластер с наименьшим количеством точек (т. е. первым).
Как с triangulate() , кластеризация плотности возвращает списки индексов, а не точек, поэтому нам нужно сопоставить индексы с их соответствующими позициями.
function update () {
// Not enough points in our data set
if (points.length <= clusterCount) return;
// k-means cluster our data
const scan = new clustering.KMEANS();
const clusters = scan.run(points, clusterCount)
.filter(c => c.length >= 3);
// Ensure we resulted in some clusters
if (clusters.length === 0) return;
// Sort clusters by density
clusters.sort((a, b) => a.length - b.length);
// Select the least dense cluster
const cluster = clusters[0];
const positions = cluster.map(i => points[i]);
// ...
}Теперь, когда у нас есть кластер, мы можем найти выпуклую оболочку его точек и удалить эти точки из нашего исходного набора данных. Модуль выпуклой оболочки возвращает список (edges) (т. е. линейных сегментов), и, взяв первую вершину в каждом ребре, мы можем сформировать замкнутую полилинию (многоугольник) для этого кластера.
function update () {
// Select a cluster
// ...
// Find the hull of the cluster
const edges = convexHull(positions);
// Ensure the hull is large enough
if (edges.length <= 2) return;
// Create a closed polyline from the hull
let path = edges.map(c => positions[c[0]]);
path.push(path[0]);
// Add to total list of polylines
lines.push(path);
// Remove those points from our data set
points = points.filter(p => !positions.includes(p));
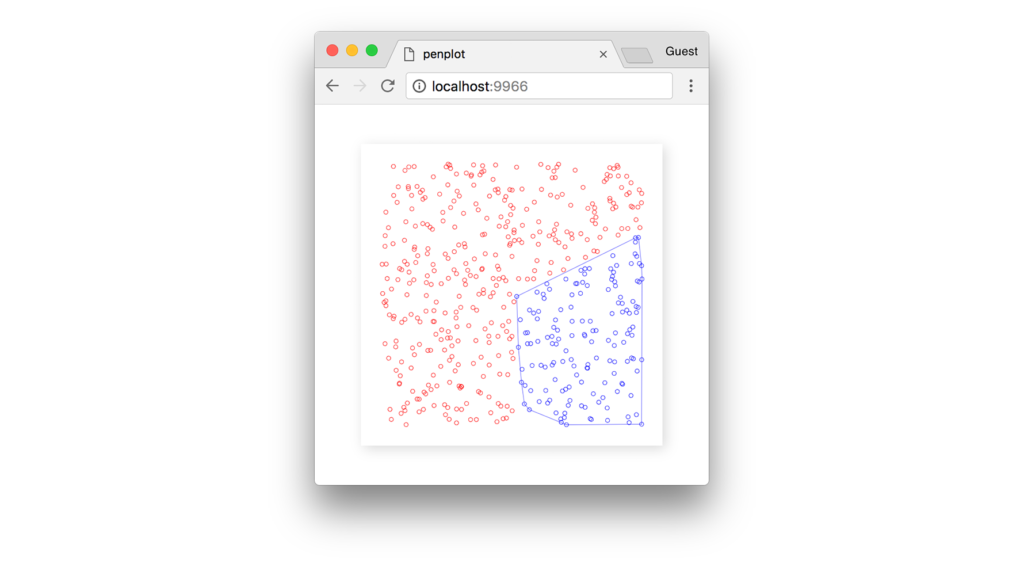
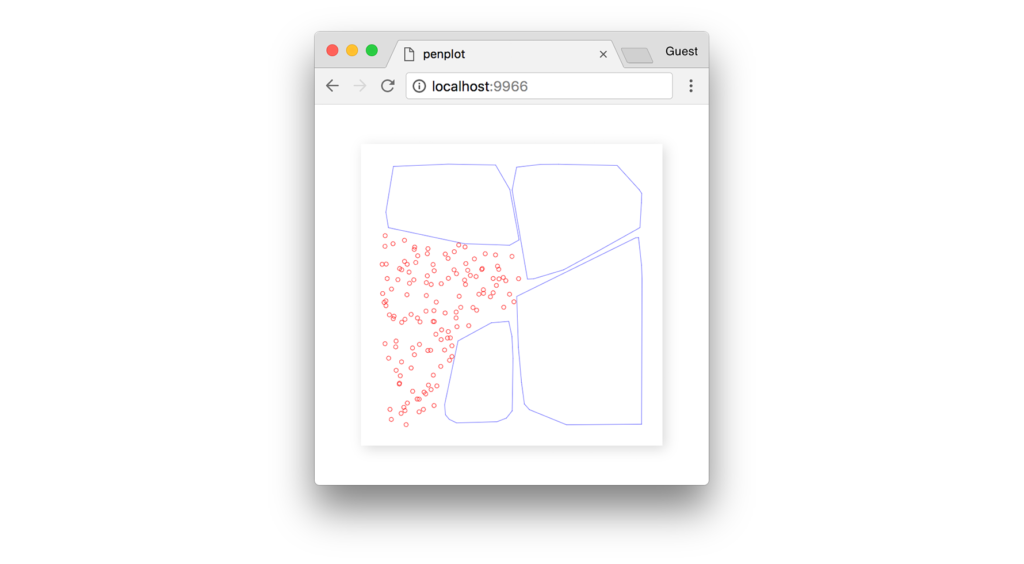
}Ниже мы видим множество синих точек (кластер) и их выпуклую оболочку, определяемую вокруг них.
Как только точки из этого кластера удаляются из набора данных, мы остаемся с многоугольником на их месте.
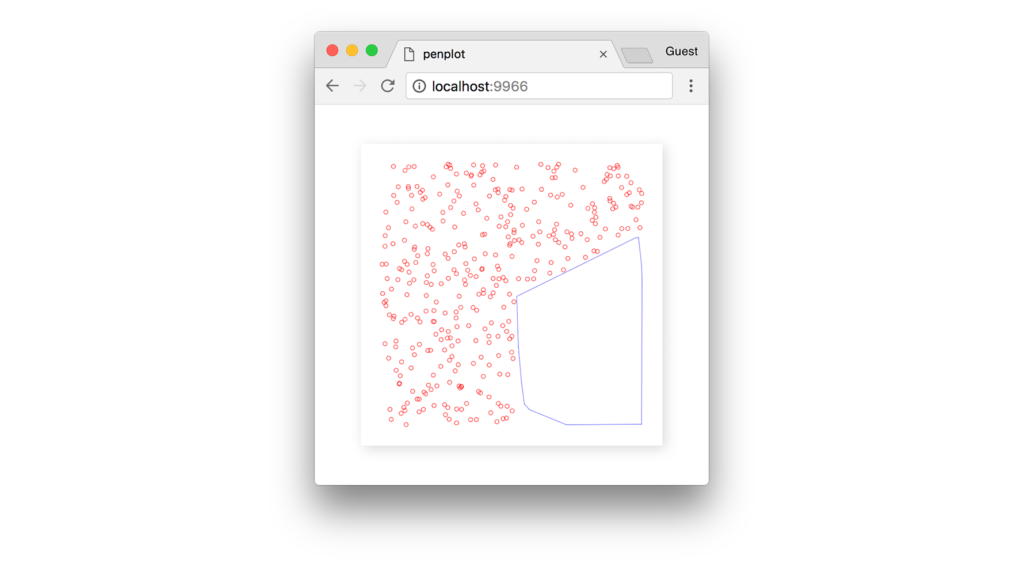
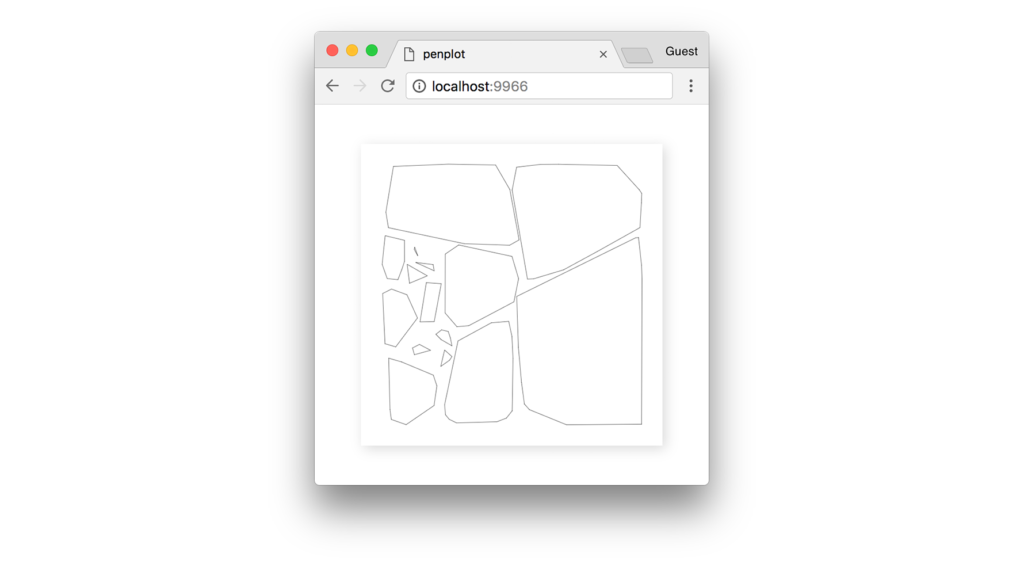
По мере продвижения алгоритма вперед мы получаем все больше полигонов, заполняющих пустое пространство.
Пока в конце концов алгоритм не сойдется, и мы не сможем найти более подходящие кластеры.
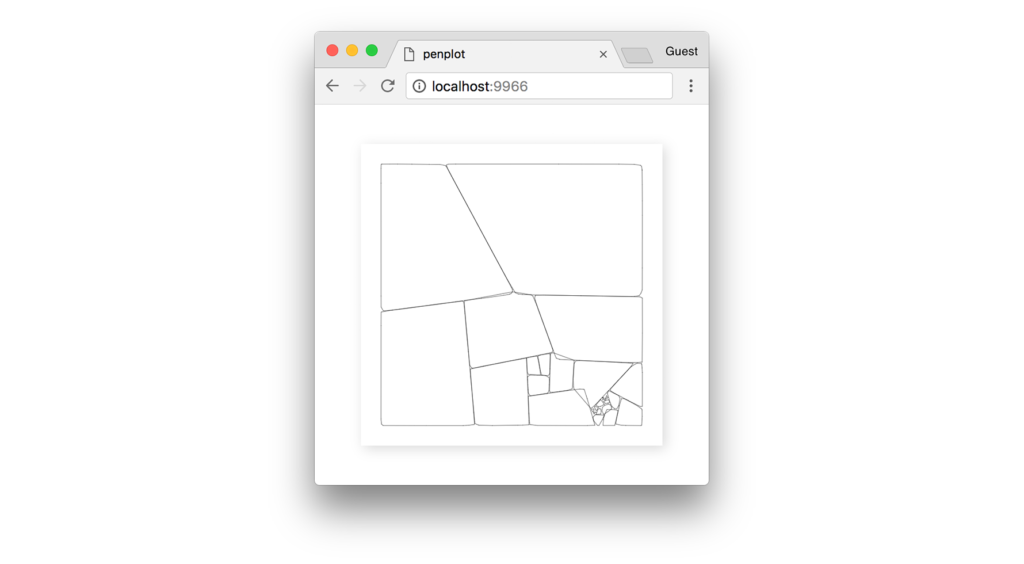
Давайте увеличим количество точек, чтобы получить более точный результат. С большим числом, например, 50 000 точек, мы получим более подробные и более гладкие полигоны.
Это ещё не всё. Дальше — больше) В следующей части покажу как эту мозаику сложить внутри сложных объектов, читайте Плоттерное искусство. Часть 2.